咨询热线
18608306161
泸州互通科技股份公司-新能源设备_环卫设备_机器人生产线_石油机械
咨询热线
18608306161

一、工业机器人上下料先拍再抓和先抓再拍的区别
先拍再抓要简单得多,拍照后,视觉给机器人纠偏位置,然后下去吸,这样能保证每次取料位置一致。
放料的时候不用管,只用走一个固定的示教点即可。
先抓再拍则因为每次吸起电芯时,吸嘴在电池上的位置不同,电池相对吸嘴的角度也不同,因此在放料那边需要做一些复杂运算才可以保证放料位置保证一致。
二、工业机器人上下料先拍再抓的流程的3个部分:
1、首先取得模板电芯的特征点信息,示教载盘上放料位置点。
2、CCD拍照,取得当前电芯特征点信息,计算当前特征与模板特征特征点的偏移值(XYU),让机器人纠偏吸盘位置。
3、机器人抓取电芯,到载盘的示教点上放料

如图所示,放置一片模板电芯到CCD下面,视觉抓边取顶边与左边及其交点。以交点做为模板的特征点,左边做为模板的方向边。
让机器人示教一个抓取电芯的点,如图1所示的这个示教点使得吸盘左边平行于电芯左边并且有一个固定距离。
让机器人把电池吸起,示教一个点放置电芯到载盘上,电芯的边按载盘所在工位的要求进行对齐。
实际拉带上的来料,姿式各种各样,如图2所示,来料电芯带角度且位置与模板电芯也不同。
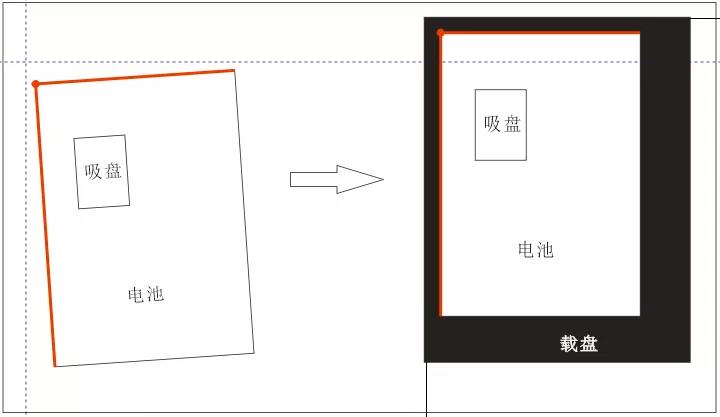
CCD拍照后,仍然计算当前电芯的特征点,与之前模板的特征点计算出偏移后的XY。
取电芯的左边线与水平轴的夹角,与之前模板的方向边计算出偏移后的U。
这时候机器人纠偏,吸盘会移动XYU,保持与电芯左边的相对位置。
然后机器人吸起电芯,走到放料的点位。
由于每次机器人取料的位置都相对于电芯的左边位置固定不变,因此使得电芯放置到放料位的位置也会保持不变。
三、不用模板实现ROI跟随
思路是取得初始电芯的中心点到和方向信息,这样即可以实现ROI跟随。
CopyRight © 2016-2026 泸州互通股份 All Right Reserved 蜀ICP备16010768号-6
泸州互通科技股份公司,专业生产:环卫设施设备、石油设施设备、工业机器人生产线、窑炉生产线、钢结构厂房及结构件、液压系统及装置。
地址:泸州市江阳区酒谷大道五段21号 手机:18608306161 / 18508308368 电话:0830-3629877 邮箱:562165072@qq.com
 扫码关注公众号
扫码关注公众号
 扫码浏览手机版
扫码浏览手机版